
Viz Mosart Administrator Guide
Version 4.1 | Published November 09, 2022 ©
Configuring a Robotic Camera
-
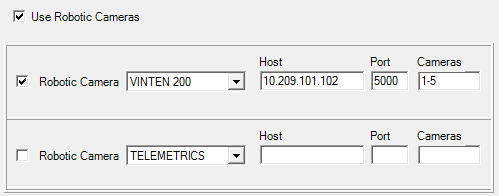
Use Robotic Cameras: Check to enable the robotic camera control functionality.
-
Robotic Camera: CAMEROBOT, CINNEO, FX-MOTION, PANASONIC, SHOTOKU TR-T, SHOTOKU TR-T IP, TECHNODOLLY, TELEMETRICS, VINTEN 200, ELECTRIC FRIENDS.
-
Host: Hostname or IP address of the RCC (Robotic Camera Controller) server.
-
Hosts (FX-Motion and Technodolly): A comma separated list of names or IP addresses for the camera robots starting from Camera 1. Missing robots are indicated by extra commas.
-
Port: Port to communicate with the RCC server.
-
Com port: For serial communication with the RCC server.
Note: When using PANASONIC you must select the Com port to use. Only one controller can be connected to each Com port.
-
Cameras: List of robotic cameras for individual stand-by control. List members are separated by commas, or by hyphens indicating ranges.
Note: When using PANASONIC the connection goes through a controller. The Cameras value is used to set the controller, so only enter one number here.
Note: To prevent SHOTOKU standby issues, add the following properties to the robotic cameras configuration file "RoboticCameraConfiguration.xml":
-
ShotokuForwardStandbyCommands (boolean) - If set to true, standby state will be forwared to Shotoku controller. Default true.
-
ShotokuDisableHeartbeat (boolean) - If set to true, the heartbeat mechanism is disabled. Default true.
-
ShotokuDisconnectInStandby (boolean) - If set to true, disconnect controller when in standby.
-
Camerobot Camera Systems
Viz Mosart can control anchor dependent shots for the Camerobot camera system. For details, please refer to Control Commands in Templates, section Command Values and Parameters, DEVICE_PROPERTY, CAMERA CONTROL.
The sequence is:
-
The Camerobot system supports shot variations dependent on current anchor information from NCS.
-
Viz Mosart retrieves presenter and pos tupples from OpenMedia and communicates them to Camerobot in the value MATRIX_SET_PRESENTER.
-
OpenMedia transmits the name of the presenter with the story via Viz Mosart to Camerobot.
-
Camerobot uses a lookup table to assign position data to individual presenter names.
-
If Time =1 (>0), Viz Mosart sends MATRIX_MOVE_MPOS command to Camerobot,
while if Time = 0 Viz Mosart sends MATRIX_CUT_MPOS command Camerobot. -
The value received from OpenMedia, would have (see Examples below) the following syntax:
[pos1:]presenter1[,[pos2:]presenter2] [,[pos3:]presenter3]…
The position and presenter is given as a tuple divided by ‘:’.
Multiple position-presenter tuples are possible separated with ‘,’.
If no position is given, ‘1’ is used as default position.
Important Setting
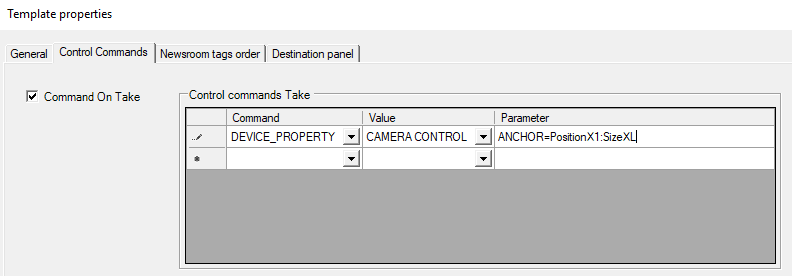
When creating the camera templates for this, the ANCHOR= is necessary for the functionality to work. The image below displays the configuration from a customer using this feature.
In template properties; use Command: DEVICE_PROPERTY → Value: CAMERA CONTROL → Parameter: ANCHOR=xxx
Examples
-
David
-
Presenter1=David, Position1=1 (default)
-
-
2:David
-
Presenter1=David, Position1 = 2
-
-
David,2:Mark
-
Presenter1=David, Position1=1 (default)
-
Presenter2=Mark, Position2=2
-
-
2:David,3:Mark
-
Presenter1=David, Position1=2
-
Presenter2=Mark, Position2=3
-
Note: The position is a string and does not have to be a number, as in the examples above.
MATRIX_SET_PRESENTER
Presenter(s) can be set whenever suitable. The presenter set influences the move selection (if a move can be found).
Warning: Recalculation of suitable moves will only be done if the robot has moved at least once after setting presenters.
It is possible to set several presenters at once (for different presenter-positions each). Just repeat the presenter tag.
<cmd id=“#int“> <type>MATRIX_SET_PRESENTER</type> <presenter pos=“#modpos“>#pres_string</presenter> [begin optional] <presenter pos=“#modpos“>#pres_string</presenter> ... [end optional]</cmd>type: Type of the command. Here it is SET_PRESENTER.
presenter: Name and position of the presenter.
pres_string: A string that identifies presenter.
pos: A string that defines the presenter position (#modpos).
This allows different behaviour, if several presenters are 'in use'. .
Response from Interface:
<ack id=”#int”> <presenter pos=“#modpos“>SYS_ACK|SYS_POS_UNKNOWN|SYS_PRESENTER_UNKNOWN</presenter> [begin optional] <presenter pos=“#modpos“>SYS_ACK|SYS_POS_UNKNOWN|SYS_PRESENTER_UNKNOWN</presenter> ... [end optional]</ack> Responses are generated in the following order:
-
SYS_PRESENTER_UNKNOWN: The presenter is unknown. No loading will be done.
-
SYS_POS_UNKNOWN: The presenter-position is unknown. No loading will be done.
-
SYS_ACK: The command was successful.