Viz Engine Administrator Guide
Version 3.14 | Published March 10, 2021 ©
Camera
In the Camera section, special camera behavior settings which are used for virtual studio setups, can be set. Viz IO is used as the studio configuration and calibration tool for enabling connectivity and control between all required studio devices such as cameras, routers, VTRs, video servers, audio mixers and other studio equipment.
Note: Viz Tracking Hub and Studio Manager are the successors of VizIO. VizIO will be deprecated soon, please consider of upgrading your virtual studio installation to Tracking Hub. To enable Tracking Hub, set the flag use_trackinghub to 1, section CAMERA.
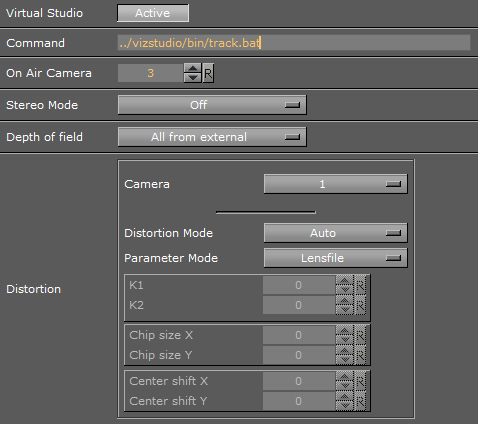
Camera Properties
-
Virtual Studio: Starts the tracking process when Viz Engine is started when set to Active.
-
Command: Set the path to the batch file that starts the tracking process. If a valid path is given, Viz Engine starts Viz IO during startup.
-
On Air Camera: Activates the selected camera that should be used when setting the scene in On Air mode. The camera is controlled by an external tracking device. To disable this feature, set to 0.
-
Stereo Mode: (license required):
Note: Stereo Mode settings only take effect when the design is taken On Air.
-
Off: Makes Stereo mode unavailable and invisible in the GUI Camera Editor.
-
Quad Buffered: Alternates the image for the left/right eye and darkens the other eye when using nVision glasses together with a monitor with a frequency >100Hz. This configuration provides the full resolution.
-
Over Under Left Top/Over Under Right Top: Draws both images beneath each. Either side can be drawn first. The image height is halved, providing half resolution.
-
Left Eye/Right Eye: Renders either the left or right eye image for dual-channel setups in combination with a Video Wall / Stereo Distributor. Full resolution.
-
Side By Side Left/Side By Side Right: Renders both images side by side, either left or right first. The image width is halved, providing half resolution.
-
-
Depth of field: Defines from where parameters are taken:
-
Use editor: Gets parameters for depth of field from the editor.
-
Focal plane from external: Gets only the focal plane from the external camera.
-
All from external: Gets all parameters from the external camera.
-
-
Distortion: Here you can set the lens distortion parameters for each camera individually.
-
Camera: Sets the camera number.
-
Distortion mode: Sets the preferred distortion depending on the tracking system which is used. Available distortion modes are:
-
Auto
-
Internal
-
Libero
-
Xpecto
-
Radial
-
Stype
-
Trackmen
-
-
Parameter mode: set the parameter for the lens distortion, depending on the tracking system which is used:
-
Auto
-
Lens File
-
Libero
-
Manual
-
Tracking Hub
-
-
See Also
-
Advanced Lens Distortion in the Viz Artist User Guide.