Here follows a growing list of real-life examples of improving the management of a production by employing a Mosart REST Driver API.
Appreciation is expressed to the organizations that kindly shared their details with Vizrt.
Examples of REST Driver Implementation
Robotics Control
You can control an MRMC Multi Head Controller (MHC) with Viz Mosart’s Generic REST API.
Prerequisites
MHC installed on a machine and set up with at least 1 robotic camera.
To configure REST API control of a robotic camera
Open AV Automation and from the menu bar, navigate to Devices > Settings.
Scroll down the Settings menu to Generic REST drivers.
Add a new driver by clicking the Plus (+) sign.
Fill in required details, following the example below:
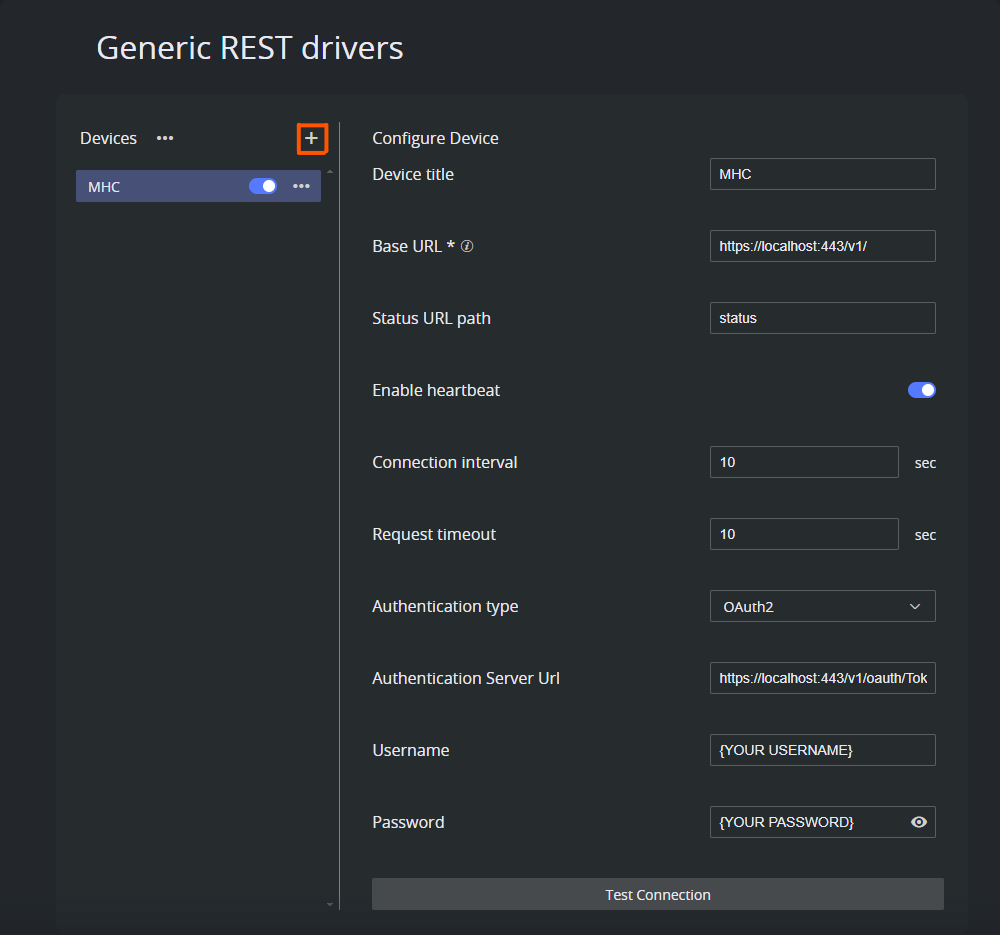
Note: Base URL and Authentication Server URL are the machine running MHC, not localhost.
Click Save and close the menu.
Open Template Editor.
(AV Automation > Devices > Template editor).Select File > New to create a new template.
Right-click in the template’s dark gray area then Enable > Generic Rest Commands.
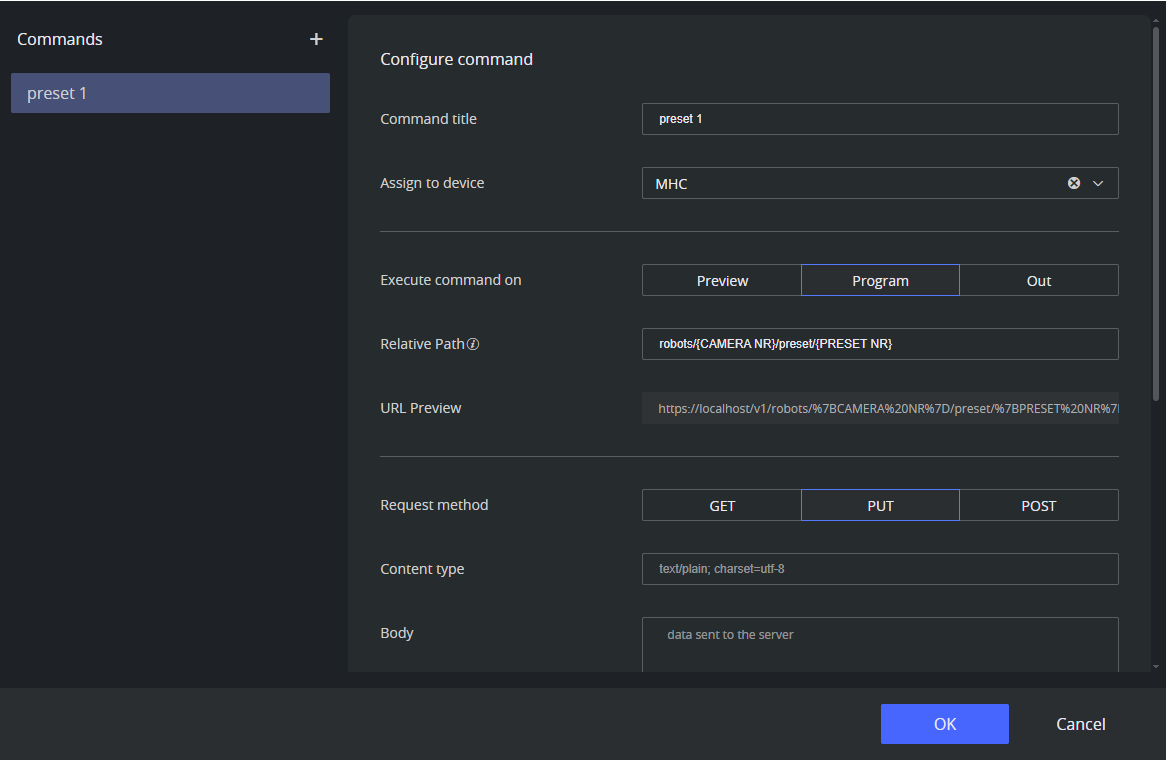
Add a command by clicking the Plus (+) sign in the left-side Commands panel.
Fill in required details, following the example below:
Note:
{CAMERA NR} is the index of the camera you want to use (starting at 0), and {CAMERA NR} is the index of the preset you want to load (starting at 0).
If you want to load preset 3 of camera 2, you would do robots/1/preset/2.Set Execute command on to your requirement, it need not be Program as shown in the sample screenshot.
Click OK.
Save the template.
Add this template to a Mosart rundown.
Whenever it is taken, it triggers MHC to move the selected robotic camera to the selected preset position.