Rigs
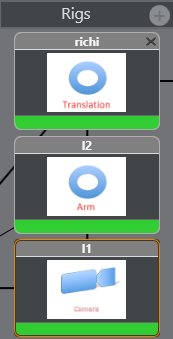
A Rig is the interface between the Tracking System and the Viz Engine. Click on any Rig icon to view its properties (see Parameter Panel).
A line from a Rig on the left represents a connection to a tracking system (see Tracking Systems). A line from a Rig on the right represents a connection to a Service (see Services).
Rigs are defined as the following types:
-
Translation
-
Arm
-
Location Pivot Rotation
-
Pivot Rotation
-
Camera
-
Object
The Translantion rig is for position data only, and provides the Tracking Hub with the following parameters:
-
pos_x
-
pos_y
-
pos_z
The Arm rig can be rotated in 3 dimensions, and starts with a swivel. It has a defined length with a defined direction, and offsets between swivel and length.
Both the Translation and Arm rigs are used for camera systems such as Spidercam:
The Location Pivot Rotation rig is a rotation interface in the X-Z dimension, with center point (0/0).
Pivot Rotation is a rotation rig with a definable center point. The rig provides the Tracking Hub with the following coordinates:
-
pivotx
-
pivoty
-
pivotz
Camera is a basic rig for tracked cameras.
Object is a basic object for tracked objects.